Liang, GY (Liang, Guangyu) [1] ; Cui, XM (Cui, Ximin) [1] ; Yuan, DB (Yuan, Debao) [1][2] ; Zhang, LY (Zhang, Liuya) [1] ; Yang, RX (Yang, Renxu) [1]
[1] College of Geoscience and Surveying Engineering, China University of Mining and Technology-Beijing,
Beijing 100083, China; sqt2300204082@student.cumtb.edu.cn (G.L.); yuandb@cumtb.edu.cn (D.Y.);
sqt2200204094@student.cumtb.edu.cn (L.Z.); sqt2200204091@student.cumtb.edu.cn (R.Y.)
[2] Inner Mongolia Research Institute, China University of Mining and Technology-Beijing, Ordos 010300, China
* Correspondence: cxm@cumtb.edu.cn
Original publication
Liang, G.; Cui, X.; Yuan, D.; Zhang, L.; Yang, R. An Improved Point Cloud Filtering Algorithm Applies in Complex Urban Environments. Remote Sens.2025,17,1452.https://doi.org/10.3390/ rs17081452
Abstract
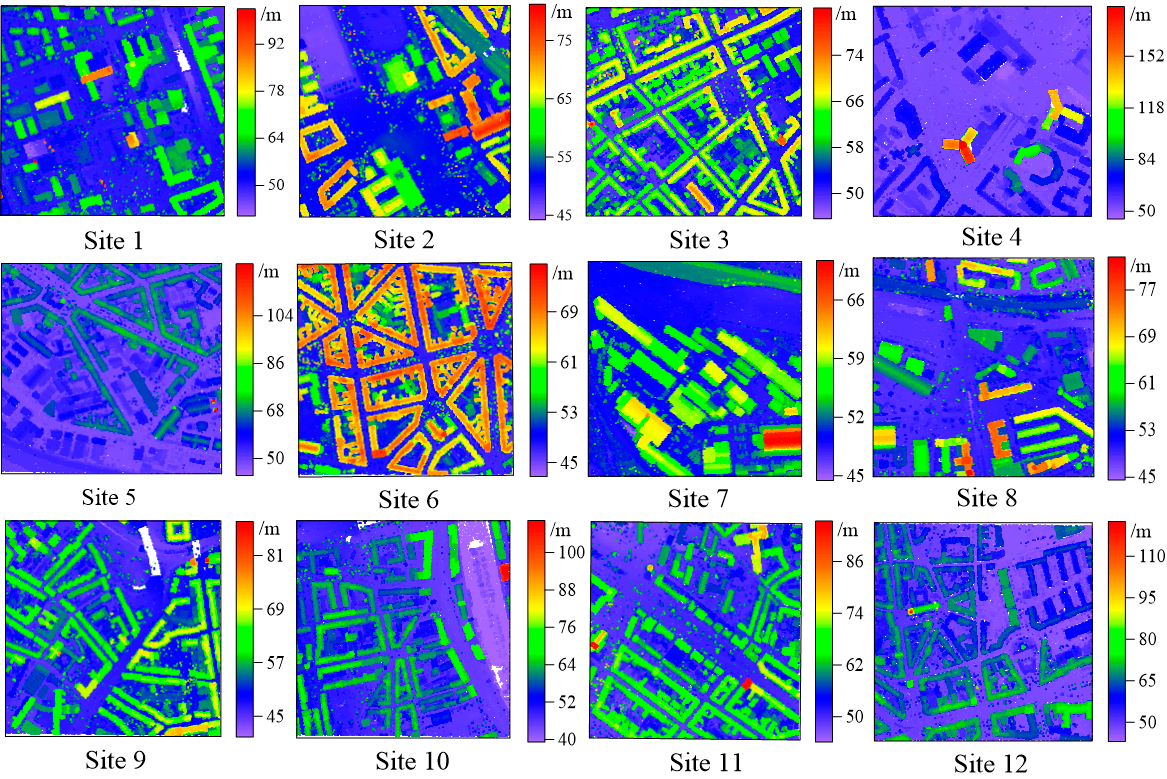
Point cloud filtering plays a crucial role in ground point extraction in urban environments. It can effectively distinguish ground points from object points, reduce data redundancy, and improve processing efficiency, providing accurate foundational data for urban 3D modeling, environmental monitoring, and intelligent management. However, current point cloud filtering algorithms have significant limitations in multi-scale structural complexity and sparse-to-dense balancing, hindering accurate extraction in complex urban environments. To address those issues, this paper proposes a point cloud filtering algorithm based on cloth simulation and progressive TIN densification (CAP). The algorithm first applies the cloth simulation filtering (CSF) algorithm to perform an initial filtering of the point cloud data and extract the initial ground points. It then constructs a TIN model based on the initial ground points, incorporating the concept of the progressive TIN densification (PTD) algorithm. Through point-by-point thresholding, the ground and object points are further refined and optimized. In the urban public point cloud datasets provided by ISPRS, the average total error is 5.90% after CAP algorithm filtering. For 12 sets of point cloud data in the North Rhine-Westphalia experimental sample area, the results show that the CAP algorithm achieves an average total error of 2.86%, which is 2.01% lower than the PTD algorithm and 0.60% lower than the CSF algorithm. The average Kappa coefficient is 94.04%, which is an improvement of 4.17% and 1.22% over the PTD and CSF algorithms, respectively. This study demonstrates that the CAP algorithm exhibits superior accuracy and adaptability for point cloud filtering tasks in urban environments, with significant application potential.
Graphical abstract
Keywords
point cloud filtering;ground point extraction;urban 3D modeling;CAP